I design sensor-dense electromechanical systems from napkin sketch to validated hardware. 100+ prototypes, 15+ iterations shipped, one published paper on democratizing motion capture.
Selected projects across robotics, biofabrication, and industrial automation.
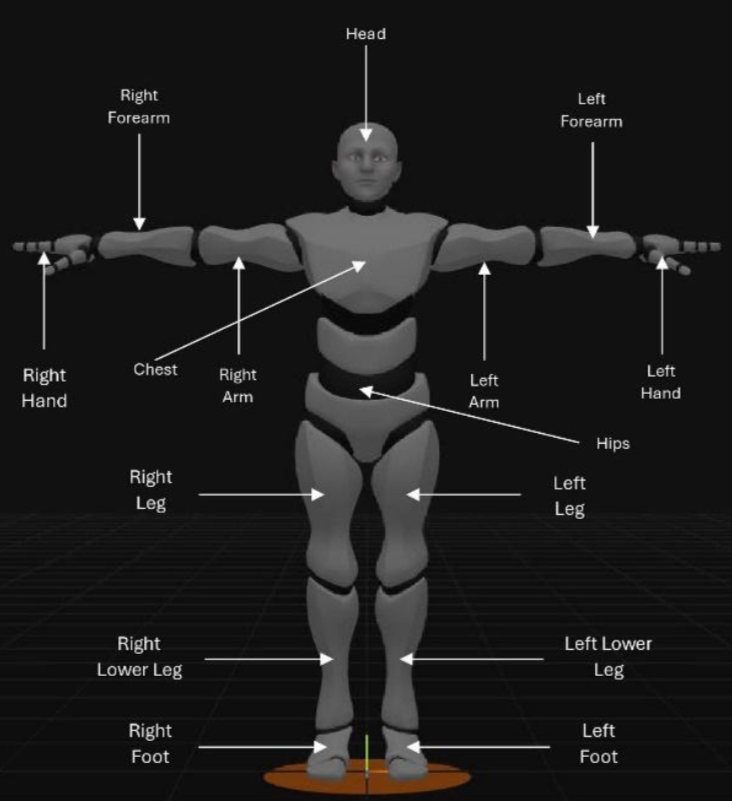
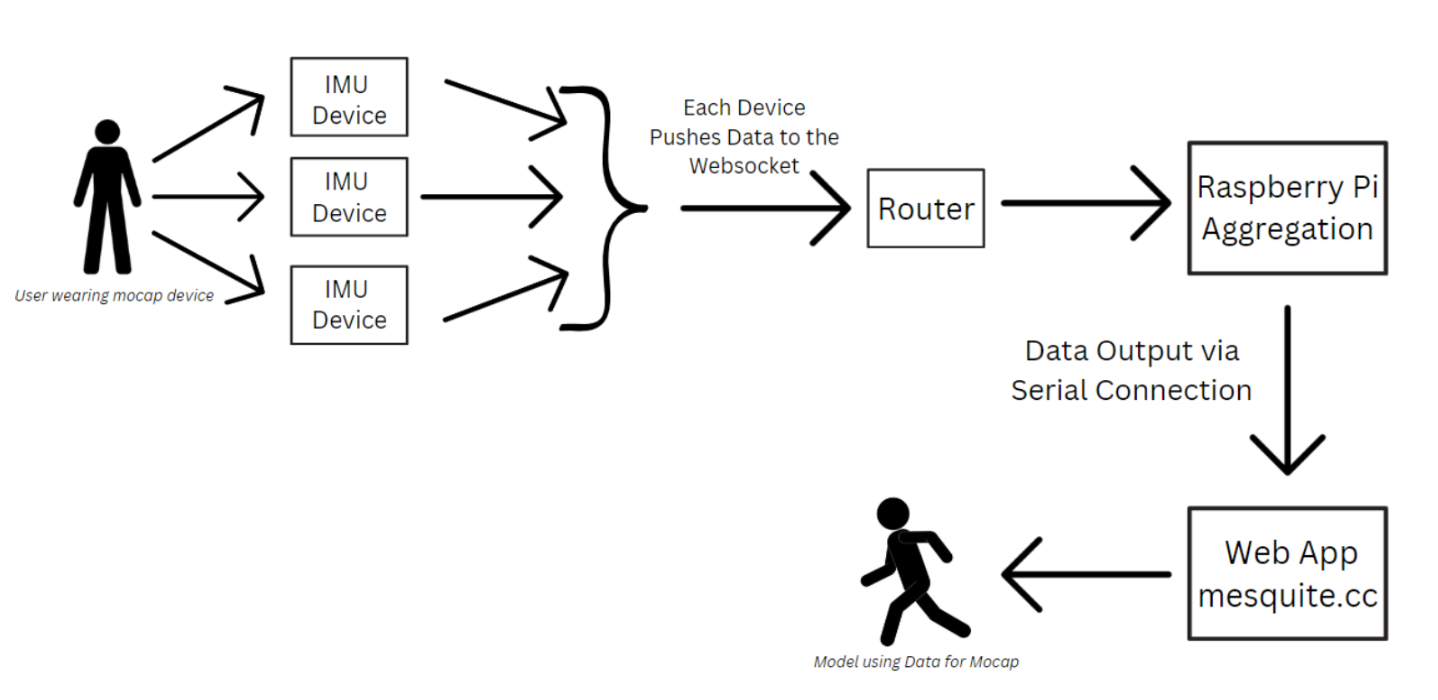
An open-source 15-node IMU suit + hip-worn smartphone for position tracking. Web-native stack (WebGL, WebXR SLAM, WebSerial, WebSockets). Benchmarks: 2–5° joint-angle error, ~15 ms latency, 99.7% packet delivery — at ~5% the cost of commercial optical systems.



.jpg)