PRJ // 0012023–2025ROBOTICS · PUBLISHED
Sensor-Dense Motion Capture
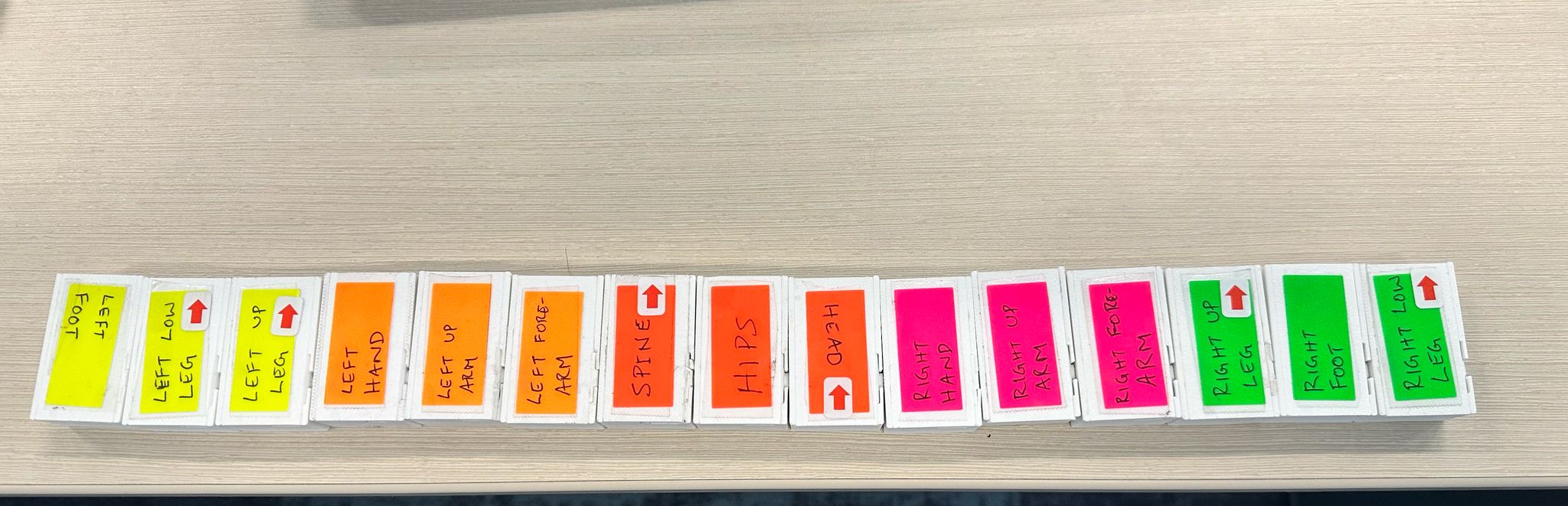
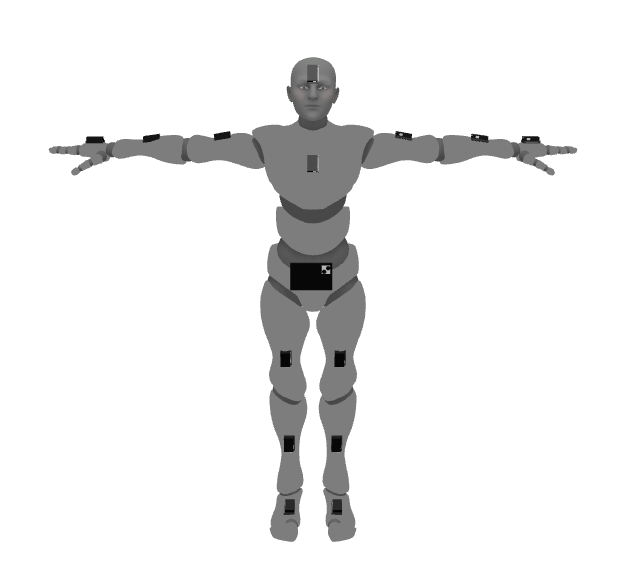
Compact assemblies integrating 15 IMUs, magnetometers, and PCBs with tight thermal and structural constraints — the mechanical side of Mesquite MoCap.
TimelineNov 2023 — May 2025
RoleMechanical design lead · concept → production transfer · FEA
SkillsSolidWorks · GD&T · FEA · Sensor packaging · Stacks
Outcome80% fit rework reduction · arXiv:2512.22690
Overview
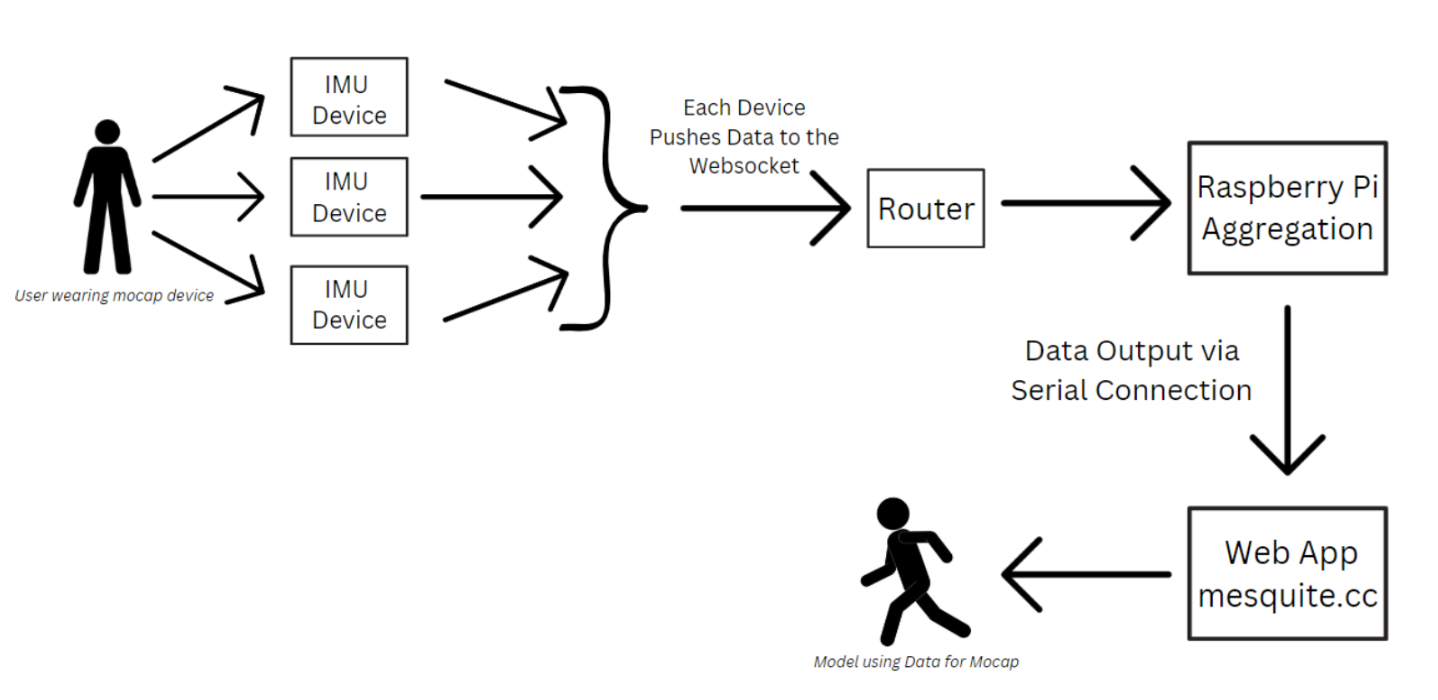
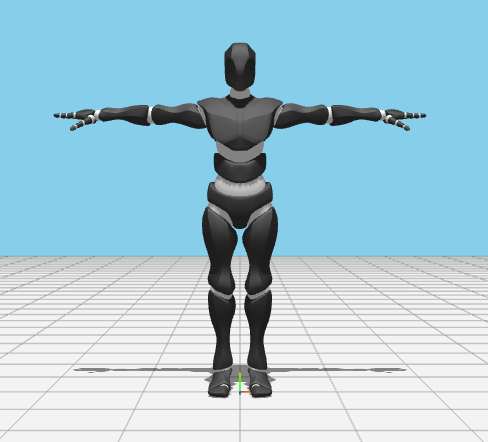
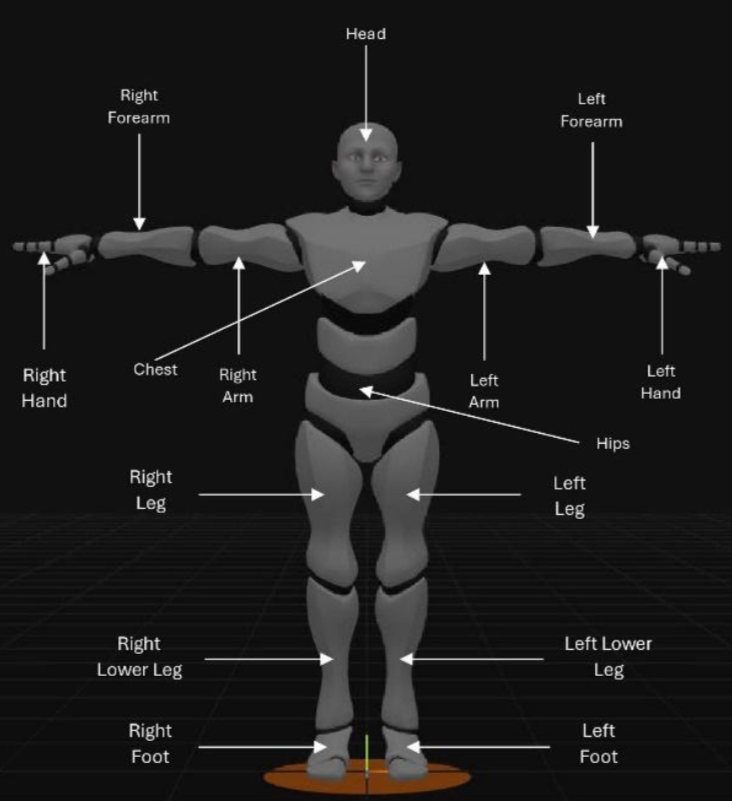
Mesquite MoCap is an open-source, low-cost inertial motion capture system that pairs a 15-node IMU suit with a hip-worn smartphone for position tracking. I led the complete mechanical design from initial concept sketches through 15+ hardware iterations to validated, field-deployable assemblies.
The Problem
Commercial optical motion capture systems cost $30,000+ and require dedicated studio space. The challenge was designing compact, body-worn enclosures that maintain sensor alignment while keeping the assembly small, thermally stable, and robust enough for repeated field use at roughly 5% of the cost.
My Approach
Introduced compliant mounting features for the IMU boards, designed thermal conduction paths to manage heat from continuous sensor operation, and optimized wall thicknesses for the best stiffness-to-weight balance. Each iteration was validated through structural FEA, hand calculations, and physical testing.
The packaging layout for the laser-cut transport case used constrained clearances and a dedicated mounting strategy, which lowered transit damage by 70% and accelerated field deployment readiness.
Key Results
100+ prototypes built across 15+ hardware iterations. Engineered 20+ precision components in SolidWorks with GD&T and statistical tolerance stacks, cutting fit rework by 80%. Streamlined the print-to-assembly cycle time by 30%. Zero load-driven failures during all verification runs. Co-authored the paper published on arXiv and submitted to IEEE IoT Journal.
Gallery